ROS环境配置
一、ubuntu虚拟机和在树莓派上的安装
目前ros版本更新到第2代,但目前学习来说用1代是很好的,所以安装第一代版本的ros
硬件配置:虚拟机是自己的笔记本电脑,树莓派是4b,8G内存
ROS1的长期支持版本是Noetic,支持的ubuntu版本是20.04,所以版本一定注意,不然之后会安装不上。
下载树莓派的官方烧录工具Pi imager,插入树莓派的系统内存卡到电脑上,选择other os中的ubuntu,进行烧录,这里选择的是20.04 64bit的server版本,之后再进行桌面UI的安装
首次进入server系统需要使用默认的账号和密码:
账号:ubuntu 密码:ubuntu 之后系统会提示你进行修改密码
树莓派可以使用有线网络连接并配置静态IP(方便后续用其他电脑进行SSH连接)
这里使用的是树莓派的无线网络配置,sudo vi进入下图的文件进行编辑,这里对于缩进的格式很有讲究,都是4个空格,需要注意,编辑好之后,:wq保存退出
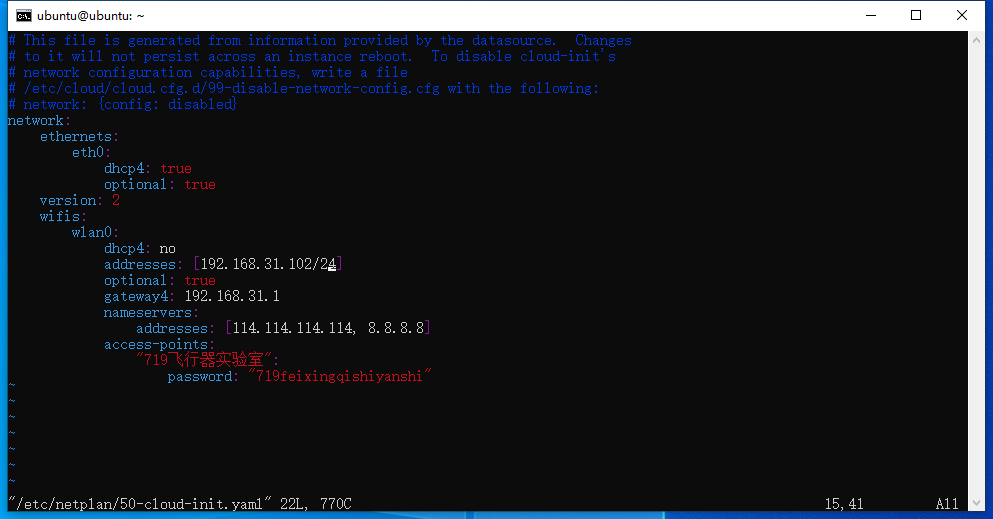
使用sudo netplan try,查看网络配置是否有问题,有问题需要对刚才的文件重新进行修改直到没有问题。
没有问题直接sudo netplan apply,就可以连接网络了
使用ifconfig(没安装需要安装这个工具包)查看当前wlan0的ip地址,看看是不是自己设置的静态ip
ping下百度,看看是否连接上外网
安装openssh:sudo apt-get install openssh-server
开启ssh服务sudo service ssh start
检查是否成功开启服务ps -aux | grep ssh
查看ssh的服务处状态sudo service ssh status,如果出现以下错误,说明没有生成ssh的key
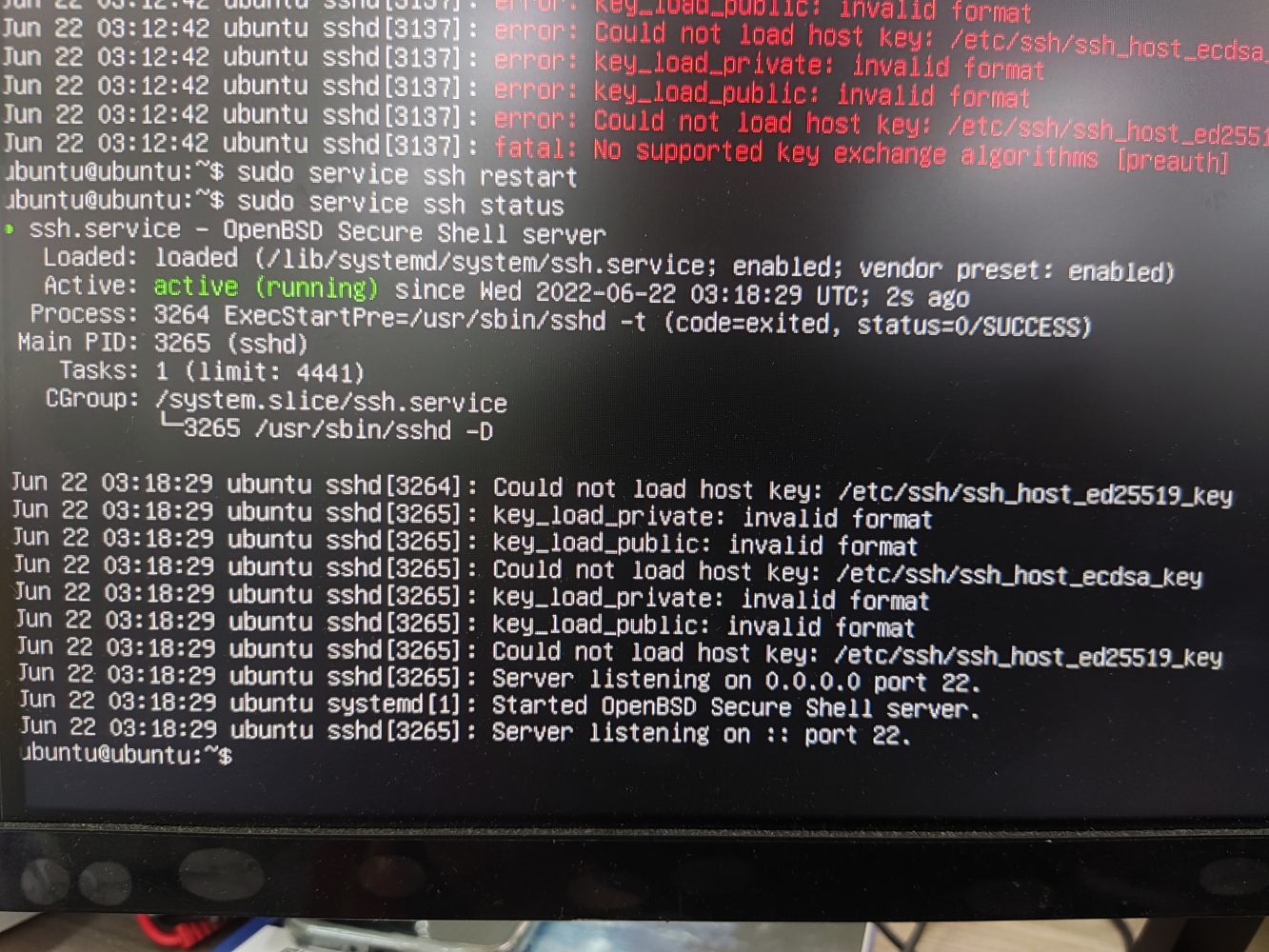 sudo ssh-keygen -t rsa -f /etc/ssh/ssh_host_rsa_key进行生成
sudo ssh-keygen -t rsa -f /etc/ssh/ssh_host_rsa_key进行生成
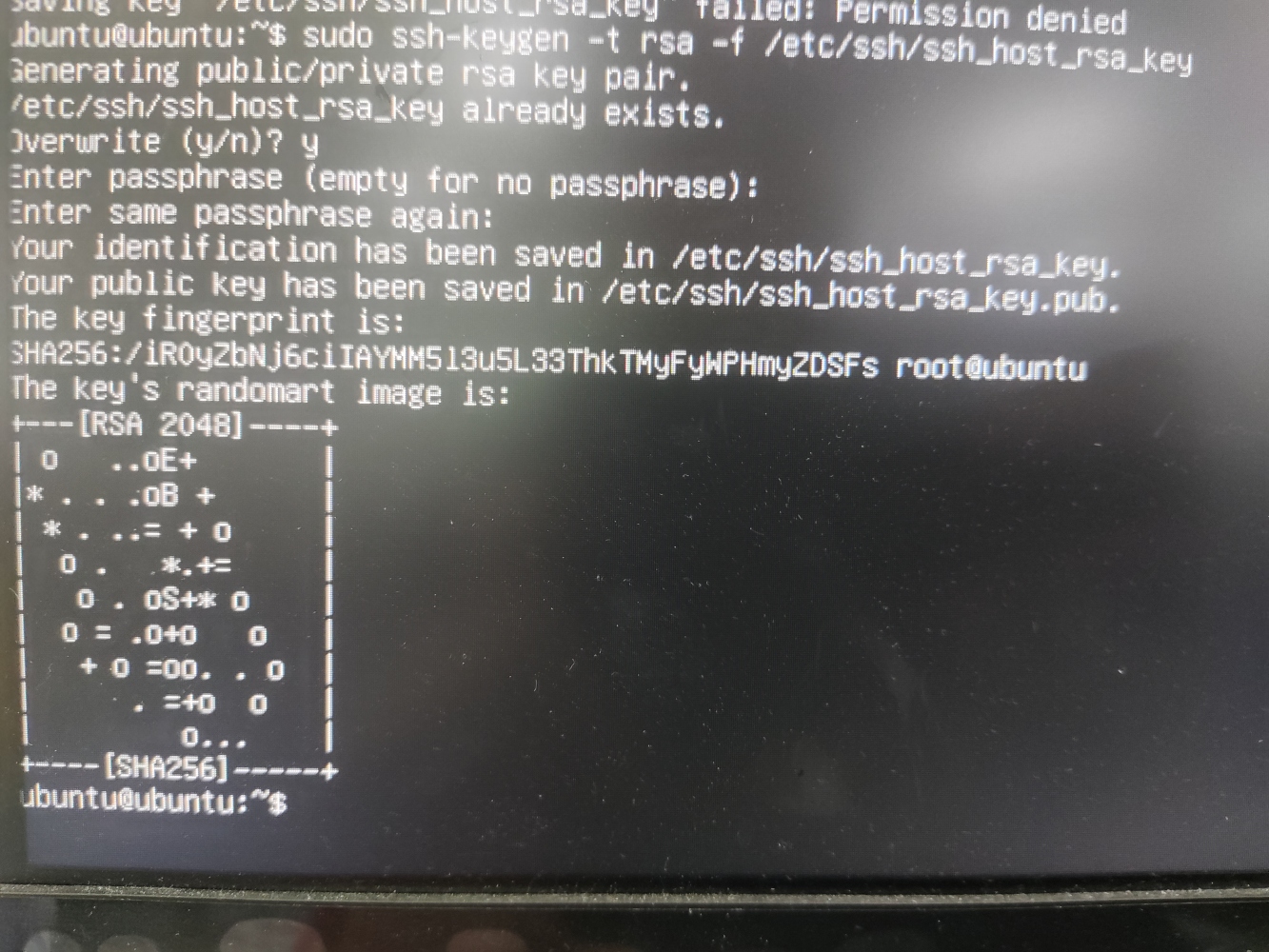 sudo service ssh restart重启服务
再次查看状态,无问题
sudo service ssh restart重启服务
再次查看状态,无问题

使用window命令行对树莓派进行ssh连接:ssh ubuntu@192.168.31.102,按照提示输入yes和密码,就进入了树莓派的终端环境
换源,这里使用的是中科大源https://mirrors.ustc.edu.cn/help/ubuntu.html
将下面的复制粘贴到/etc/apt/sources.list
# 默认注释了源码仓库,如有需要可自行取消注释
deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal main main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main restricted universe multiverse
# 预发布软件源,不建议启用
# deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-proposed main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-proposed main restricted universe multiverse
一定要看好自己的系统是什么版本
安装桌面环境 apt-get install ubuntu-desktop
安装windows远程桌面依赖
sudo apt-get install tightvncserver xrdp
连接时使用windows的远程桌面连接,输入ubuntu的ip地址,session选择Xorg,账号和密码选择ubuntu的账号和密码,连接就可以。
二、安装ros1
可以参考官方的安装教程: http://wiki.ros.org/cn/noetic/Installation/Ubuntu
设置软件源,这里使用中科大软件源
sudo sh -c ‘. /etc/lsb-release && echo “deb http://mirrors.ustc.edu.cn/ros/ubuntu/ lsb_release -cs main” > /etc/apt/sources.list.d/ros-latest.list’sudo sh -c ‘./etc/lsb-release && echo “deb http://mirrors.ustc.edu.cn/ros/ubuntu/ lsb_release -cs main” > /etc/apt/sources.list.d/ros-latest.list’
设置秘钥
sudo apt-key adv –keyserver ‘hkp://keyserver.ubuntu.com:80’ –recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

sudo apt update

sudo apt install ros-noetic-desktop-full

虚拟机和树莓派的两个系统都要安装ros
 安装成功的页面
安装成功的页面
source /opt/ros/noetic/setup.bash
安装依赖sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
三、配置工作环境
创建工作区域
下面的命令可以创建一个空白的ros包工作空间: mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catkin_make 空白工作空间的目录如下:
.
├── build
│ ├── CATKIN_IGNORE
│ ├── CMakeCache.txt
│ ├── CMakeFiles
│ │ ├── 3.16.3
│ │ │ ├── CMakeCCompiler.cmake
│ │ │ ├── CMakeCXXCompiler.cmake
│ │ │ ├── CMakeDetermineCompilerABI_C.bin
│ │ │ ├── CMakeDetermineCompilerABI_CXX.bin
│ │ │ ├── CMakeSystem.cmake
│ │ │ ├── CompilerIdC
│ │ │ │ ├── CMakeCCompilerId.c
│ │ │ │ ├── a.out
│ │ │ │ └── tmp
│ │ │ └── CompilerIdCXX
│ │ │ ├── CMakeCXXCompilerId.cpp
│ │ │ ├── a.out
│ │ │ └── tmp
│ │ ├── CMakeDirectoryInformation.cmake
│ │ ├── CMakeError.log
│ │ ├── CMakeOutput.log
│ │ ├── CMakeRuleHashes.txt
│ │ ├── CMakeTmp
│ │ ├── Makefile.cmake
│ │ ├── Makefile2
│ │ ├── TargetDirectories.txt
│ │ ├── clean_test_results.dir
│ │ │ ├── DependInfo.cmake
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ └── progress.make
│ │ ├── cmake.check_cache
│ │ ├── download_extra_data.dir
│ │ │ ├── DependInfo.cmake
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ └── progress.make
│ │ ├── doxygen.dir
│ │ │ ├── DependInfo.cmake
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ └── progress.make
│ │ ├── progress.marks
│ │ ├── run_tests.dir
│ │ │ ├── DependInfo.cmake
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ └── progress.make
│ │ └── tests.dir
│ │ ├── DependInfo.cmake
│ │ ├── build.make
│ │ ├── cmake_clean.cmake
│ │ └── progress.make
│ ├── CTestConfiguration.ini
│ ├── CTestCustom.cmake
│ ├── CTestTestfile.cmake
│ ├── Makefile
│ ├── atomic_configure
│ │ ├── _setup_util.py
│ │ ├── env.sh
│ │ ├── local_setup.bash
│ │ ├── local_setup.sh
│ │ ├── local_setup.zsh
│ │ ├── setup.bash
│ │ ├── setup.sh
│ │ └── setup.zsh
│ ├── bin
│ ├── catkin
│ │ └── catkin_generated
│ │ └── version
│ │ └── package.cmake
│ ├── catkin_generated
│ │ ├── env_cached.sh
│ │ ├── generate_cached_setup.py
│ │ ├── installspace
│ │ │ ├── _setup_util.py
│ │ │ ├── env.sh
│ │ │ ├── local_setup.bash
│ │ │ ├── local_setup.sh
│ │ │ ├── local_setup.zsh
│ │ │ ├── setup.bash
│ │ │ ├── setup.sh
│ │ │ └── setup.zsh
│ │ ├── order_packages.cmake
│ │ ├── order_packages.py
│ │ ├── setup_cached.sh
│ │ └── stamps
│ │ └── Project
│ │ ├── _setup_util.py.stamp
│ │ ├── interrogate_setup_dot_py.py.stamp
│ │ ├── order_packages.cmake.em.stamp
│ │ └── package.xml.stamp
│ ├── catkin_make.cache
│ ├── cmake_install.cmake
│ ├── gtest
│ │ ├── CMakeFiles
│ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ └── progress.marks
│ │ ├── CTestTestfile.cmake
│ │ ├── Makefile
│ │ ├── cmake_install.cmake
│ │ ├── googlemock
│ │ │ ├── CMakeFiles
│ │ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ │ ├── gmock.dir
│ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ ├── build.make
│ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ ├── depend.make
│ │ │ │ │ ├── flags.make
│ │ │ │ │ ├── link.txt
│ │ │ │ │ ├── progress.make
│ │ │ │ │ └── src
│ │ │ │ ├── gmock_main.dir
│ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ ├── build.make
│ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ ├── depend.make
│ │ │ │ │ ├── flags.make
│ │ │ │ │ ├── link.txt
│ │ │ │ │ ├── progress.make
│ │ │ │ │ └── src
│ │ │ │ └── progress.marks
│ │ │ ├── CTestTestfile.cmake
│ │ │ ├── Makefile
│ │ │ └── cmake_install.cmake
│ │ ├── googletest
│ │ │ ├── CMakeFiles
│ │ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ │ ├── gtest.dir
│ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ ├── build.make
│ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ ├── depend.make
│ │ │ │ │ ├── flags.make
│ │ │ │ │ ├── link.txt
│ │ │ │ │ ├── progress.make
│ │ │ │ │ └── src
│ │ │ │ ├── gtest_main.dir
│ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ ├── build.make
│ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ ├── depend.make
│ │ │ │ │ ├── flags.make
│ │ │ │ │ ├── link.txt
│ │ │ │ │ ├── progress.make
│ │ │ │ │ └── src
│ │ │ │ └── progress.marks
│ │ │ ├── CTestTestfile.cmake
│ │ │ ├── Makefile
│ │ │ └── cmake_install.cmake
│ │ └── lib
│ └── test_results
├── devel
│ ├── _setup_util.py
│ ├── cmake.lock
│ ├── env.sh
│ ├── lib
│ ├── local_setup.bash
│ ├── local_setup.sh
│ ├── local_setup.zsh
│ ├── setup.bash
│ ├── setup.sh
│ └── setup.zsh
└── src
└── CMakeLists.txt -> /opt/ros/noetic/share/catkin/cmake/toplevel.cmake